
Differentialgleichungen und Testfunktionen#
Mit dem white box-Verfahren lösen wir das System-Identifizierungsproblem indem wir genau analysieren, aus welchen Komponenten unser System besteht. Anhand eines Tiefpasses 1. Ordnung, wie in Abb. 55 dargestellt, wollen wir uns die Vorgehensweise einmal ansehen.
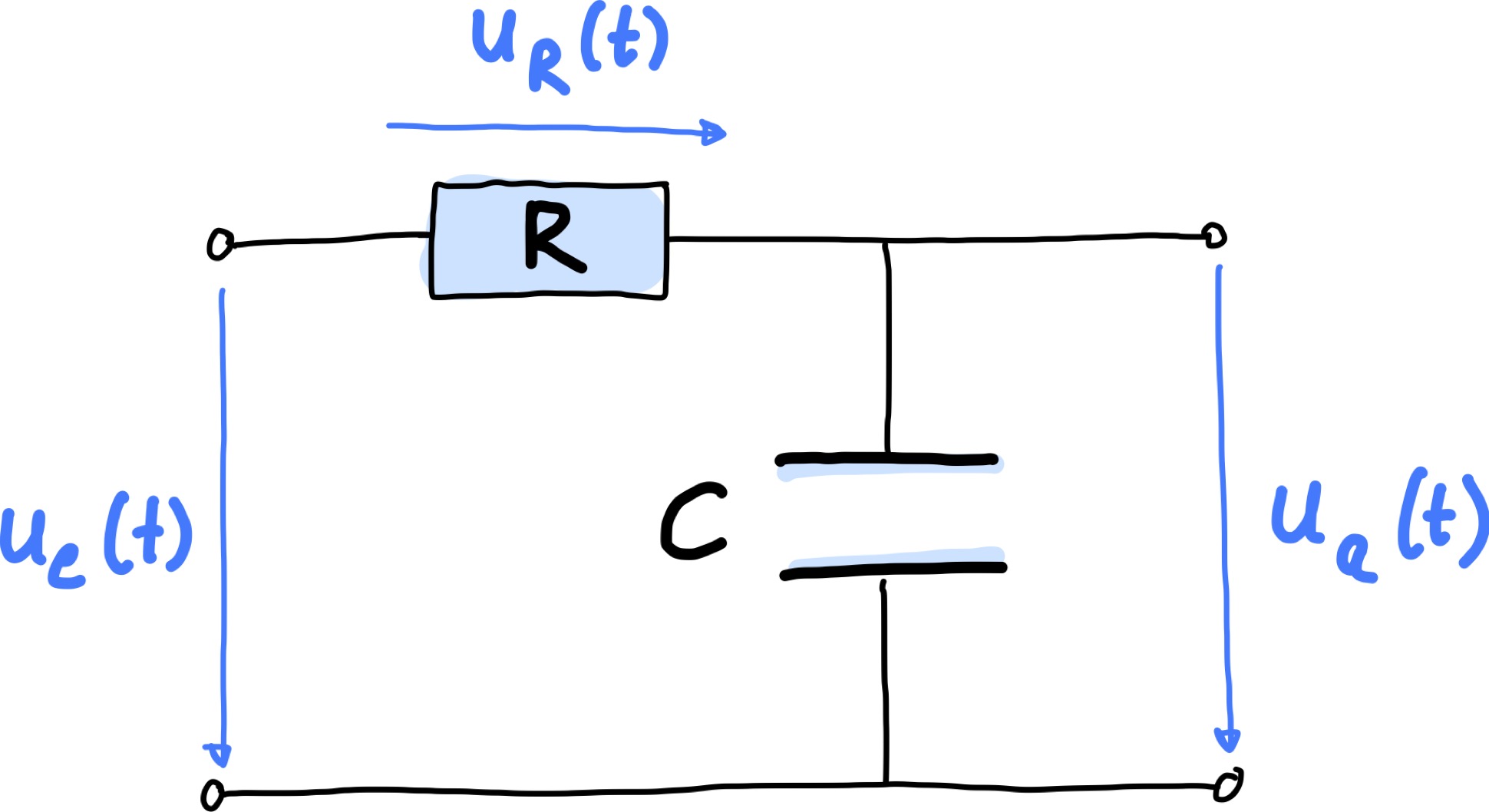
Abb. 55 Schaltbild eines passiven Tiefpasses 1. Ordnung.#
Differentialgleichung aufstellen#
In diesem Falle gucken wir in unser System rein. Wir sehen die elektronische Schaltung bestehend aus einer Reihenschaltung von Widerstand mit Wert \(R\) und Kondensator mit Kapazität \(C\).
Am Eingang liegt die Spannung \(u_e(t)\) an. Über \(C\) kann die Ausgangsspannung \(u_a(t)\) gemessen werden. Der Strom, mit dem der Kodensator aufgeladen ist bekanntlich
wobei \(u_a(t)\) im allgemeinen die Spannung ist, die am Kondensator anfällt und in diesem Falle gleich der Ausgangsspannung ist.
Außerdem gilt \(i_R(t) = i_C(t)\). Damit können wir die Spannung, die über den Widerstand \(R\) abfällt, wie folgt schreiben:
Aus der Maschenregel, hier \( u_a(t) + u_R(t) = u_e(t)\) folgt nach Einsetzen von \(u_R(t)\):
Dies ist eine Differentialgleichung (DGL) 1. Ordnung. Die Differentialgleichung erkannt man daran, dass auch eine zeitliche Ableitung der Ausgangsgröße (also ein Differential) in der Formel auftritt. Da allerdings nur die 1. zeitliche Ableitung auftritt, handelt es sich um eine DGL 1. Ordnung. Würde Ausgangs oder Eingangsgröße zweimal zeitliche abgeleitet werden, würde es sich um eine DGL 2. Ordnung handeln usw.
Systeme 1. Ordnung beschreiben Energiespeicher, also z.B. Temperaturmesser, die warm werden, oder auch Operationsverstärker, Kapazitäten und Elektromagneten. Im Prinzip ist jedes System, was sich erwärmt, ein Energiespeicher und wird somit ein System 1. Ordnung sein. Systeme 2. Ordnung haben einen zusätzlichen Dämpfungsterm. In diesen Systemen findet auch eine Umlagerung von Energien statt, wie es z.B. in einem LC-Schwingkreis passiert. Kondensator und Spule tauschen ständig Energien aus, wodurch es zu einer periodischen Schwingung kommt. Dieses System wir durch eine DGL 2. Ordnung beschrieben.
Lösung der DGL im Zeitbereich#
Ziel ist es jetzt, eine Funktion für Eingangs- und Ausgangsspannung zu finden, die diese Gleichung erfüllt. Hierfür geht man im Allgemeinen in 5 Schritten vor. Wir werden später in diesem Kapitel noch sehen, dass DGL im Frequenz- bzw. Laplaceraum viel einfacher gelöst werden können als wir es hier, im Zeitraum, jetzt machen.
1. Homogener Ansatz: Unter homogenen Ansatz verstehen wir das Eingangssignal auf Null zu setzen: \(u_e(t) = 0\). Das heißt das System wird nicht belastet. Die DGL vereinfacht sich zu
und kann umgeformt werden zu
Das bedeutet, wir suchen eine Funktion für \(u_a(t)\) die nach der Zeit abgeleitet wieder sie selber ist. Eine Exponentialfunktion erfüllt genau diese Bedingung und wir nutzen sie für unseren homogenen Ansatz:
mit den Konstanten \(K\) und \(\gamma\). Dies wird in die homogene DGL eingesetzt und es folgt:
Daraus folgt für die erste Konstante
2. Spezieller Ansatz eine Sprunganregung: Jetzt legen wir statt Null einen Sprung an den Eingang \(u_e(t)\) an: \(u_e(t) = u_0\) für \(t = 0\). Für lange Zeiten wird sich der Kondensator komplett aufgeladen haben, sodass der Ausgang ein konstantes Signal liefert. Das heißt unsere Lösung für ein spezielles Eingangssignal ist
Show code cell source
#Benötigte Libraries:
import numpy as np
import pandas as pd
from scipy import signal
import scipy.integrate as spi
import matplotlib.pyplot as plt
import plotly.offline as py
py.init_notebook_mode(connected=True)
import plotly.graph_objs as go
import plotly.tools as tls
import seaborn as sns
import time
import warnings
warnings.filterwarnings('ignore')
fig, ax = plt.subplots(figsize=(5, 3))
plt.style.use('default') # Matplotlib Style wählen
#plt.xkcd()
plt.rcParams['font.size'] = 10; # Schriftgröße
def heaviside_step_function(t):
if t < 0:
res = 0
else:
res = 1
return res
T = 1
t2 = np.linspace(-2*T, 7*T, 1000, endpoint = True)
y_step = []
for i in t2:
y_step.append(heaviside_step_function(i))
# Plotting
plt.plot(t2,y_step, color = 'tab:blue')
ax.set_yticks([0,1], labels = ['0', r'$u_0$'])
ax.set_xticks([0])
plt.xlabel('Zeit t')
plt.ylabel('u_e')
Text(0, 0.5, 'u_e')
Im Diagramm ist eine Sprunganregung zur Zeit \(t = 0\,\mathrm s\) dargestellt.
3. Allgemeiner Ansatz: Nun kann der allgemeine Ansatz formuliert werden. Dieser ist einfach die Addition von homogener und spezieller Ansatz:
4. Konstante bestimmen: Eine Konstante war schon bestimmt, nämlich \(\gamma = \frac{1}{RC} := \frac{1}{\tau}\). Diese Zeitkonstante wurde bereits in den allgemeinen Ansatz unter 3. eingefügt. Um \(K\) zu bestimmen, setzen wir unsere Anfangsbedingung von Schritt 2. ein: Zum Zeitpunkt \(t=0\) ist das System zwar am Eingang mit \(u_0\) belastet, der Ausgang ist jedoch noch Null, solange der Kondensator nicht vollständig aufgeladen ist. Wir setzen also \(t=0\), \(u_e(t=0) = u_0\) und \(u_a(t = 0) = 0\) in den allgemeinen Ansatz ein:
5. Lösung hinschreiben: Für die Lösung setzen wir alle unsere bestimmten Konstanten in den allgemeinen Ansatz ein und erhalten:
Dies ist auch die sogenannte Sprungantwort eines Systems 1. Ordnung, da wir in Schritt 2. einen Sprung angelegt haben. Hätten wir uns als Eingangssignal einen Impuls (eine Delta-Funktion) ausgesucht, hätten wir die Impulsantwort des Systems bestimmt.
Eigenschaften von Sprung- und Impulsantwort#
Um ein vorliegendes Messsystem im Labor zu charakterisieren, kann man beispielsweise das System mit einem Sprung anregen und die Sprungantwort messen.
Im nachfolgenden Bild ist die Sprungsantwort des Tiefpasses 1. Ordnung gezeichnet. Was kann man aus der Sprungsantwort direkt alles ablesen?
Geplottet im nachfolgenden Bild ist die normalisierte Sprungantwort, d.h. das Ausgangssignal wurde durch \(u_0\) dividiert. Nach langer Einpendelzeit folgt der Ausgang dem Eingangssignal.
\(\tau\) ist die Zeitkonstante, die die Trägheit eines Systems bestimmt.
Aus der Theorie ist bekannt: \(\tau = RC\)
Nach der Zeit \(\tau\) ist das Ausgangssignal auf 63% seines maximal möglichen Wertes angestiegen. Es ist noch kein stationärer Zustand erreicht.
Einstellzeit \(t_e\): Dies ist das 95%-Kriterium:
Für ein System 1. Ordnung muss die Sprungantwort \(h(t)\) nach der Zeit \(t = 3\tau\) 95% des Endwertes erreicht haben.
Nur wenn dies der Fall ist, handelt es sich um ein System mit Ausgleich 1. Ordnung
Für ein System 2. Ordnung ist häufig ein Überschwingen oder Einpendeln zu beoachten. Dann ist \(t_e\) Zeit vom Anlegen der Sprungfunktion bis zum Erreichen des Toleranzbandes innerhalb von 0,95 und 1,05 (siehe Dynamische Fehler weiter unten).
Anstiegszeit \(t_r\): Dies ist die Dauer für einen Signalanstieg von 10% auf 90% am Ausgang des Systems.
Show code cell source
import numpy as np
import scipy.signal as signal
import matplotlib.pyplot as plt
import warnings
warnings.filterwarnings('ignore')
# MatplotLib Settings:
plt.style.use('default') # Matplotlib Style wählen
#plt.xkcd()
plt.rcParams['font.size'] = 10; # Schriftgröße
def heaviside_step_function(t):
if t < 0:
res = 0
else:
res = 1
return res
# Transfer Funktion Tiefpass:
K = 1 # Verstärkungsfaktor
T = 1 # Zeit nach der 63% des Signals erreicht ist
num = np.array([K])
den = np.array([T , 1])
H = signal.TransferFunction(num , den)
T = 1
t2 = np.linspace(-2*T, 7*T, 1000, endpoint = True)
# Sprung
y_step = []
for i in t2:
y_step.append(heaviside_step_function(i))
# Impuls:
def ddf(x,sig):
val = np.zeros_like(x)
val[(-(1/(2*sig))<=x) & (x<=(1/(2*sig)))] = 1
return val
y_impuls = ddf(t2,6.)
# Sprungantwort:
t, y = signal.step(H)
# Impulsantwort
t_imp, y_imp = signal.impulse(H)
# Plotting
plt.figure(figsize=(8, 4))
plt.subplot(1,2,1)
plt.axhline(y = 1.0, color='k', ls = '--', lw = 1)
plt.axhline(y = 0.95, color='k', ls = '--', lw = 1)
plt.axhline(y = 0.63, color='k', ls = '--', lw = 1)
plt.axvline(x = T, color='k', ls = '--', lw = 1)
plt.axvline(x = 3*T, color='k', ls = '--', lw = 1)
plt.plot(t2,y_step, color = 'tab:red', label = r'Sprunganregung $\sigma(t)$')
plt.plot(t, y, color='tab:blue', label = r'Sprungantwort $h(t)$')
#plt.yticks([1.0, 0.95,0.63], labels = ['100%','95%', '63%'])
plt.xticks([0,T,3*T], labels = ['0',r'$\tau$',r'$3\tau$'])
plt.title("Sprungantwort eines Tiefpasses")
plt.xlabel("Zeit t")
plt.ylabel(r'$u_a(t)/u_0$')
plt.legend()
plt.subplot(1,2,2)
plt.plot(t2, y_impuls, color = 'tab:red', label = r'Impulsanregung $\delta(t)$')
plt.plot(t_imp, y_imp, color='tab:blue', label = r'Impulsantwort $g(t)$')
plt.yticks([1.0, 0.5,0.0], labels = ['100%','50%', '0%'])
plt.title("Impulsantwort eines Tiefpasses")
plt.xlabel("Zeit t")
plt.legend()
#plt.ylabel(r'$u_a(t)/u_0$')
plt.tight_layout()
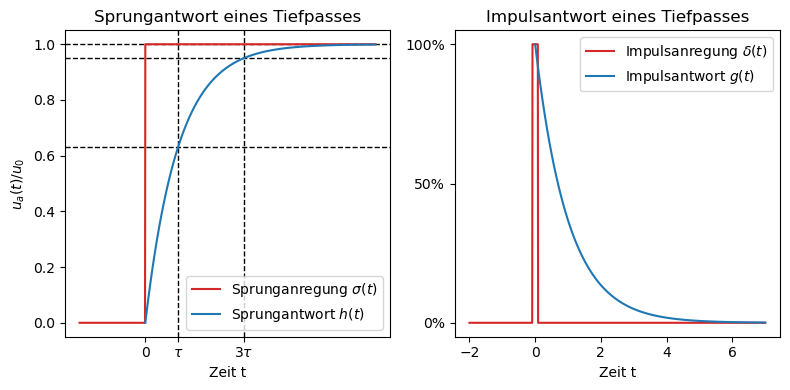
Im Diagramm sind Sprung- (links) und Impulsantwort (rechts) eines Tiefpasses dargestellt. Zum Vergleich ist die jeweilige Anregung des Systems (also Sprung \(\sigma\) bzw. Impuls \(\delta\)) in rot dargestellt. Die blauen Kurven zeigen das Antwortverhalten des Tiefpasses.
Folgende Eigenschaften bestehen zwischen Sprung- und Impulsantwort:
Die Sprunganregung \(\sigma(t)\) liefert die Sprungantwort \(h(t)\)
Die Impulsanregung \(\delta(t)\) liefert die Impulsantwort \(g(t)\)
Die Ableitung der Sprunganregung \(\sigma(t)\) ist die Impulsanregung \(\delta(t)\), d.h. es gilt:
\[\dot \sigma(t) = \frac{d\sigma(t)}{dt} = \delta(t)\]Für LTI Systeme gilt, dass auch die Ableitung der Sprungantwort \(h(t)\) die Impulsantwort \(g(t)\) liefert:
\[\dot h(t) = \frac{dh(t)}{dt} = g(t)\]D.h. Sprung- und Impulsverhalten eines Messsystems können mittels Ableitung bzw. Integration direkt ineinaner umgerechnet werden, ohne ein neues Testsignal anlegen zu müssen (oder die DGL neu zu lösen)
Dynamische Fehler#
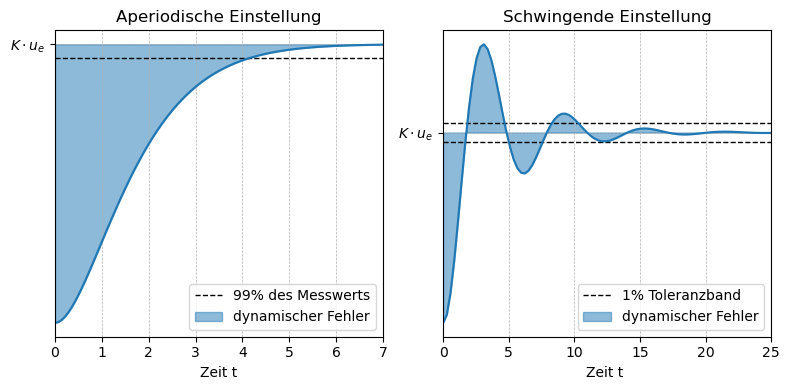
In den folgenden Plots ist das zeitliche Verhalten der von möglichen Sprungantworten eines Systems 2. Ordnung dargestellt. Je nach Dämpfung erhält man ein Überschwingen, ein langsames Annähern (aperiodische Einstellung links)) oder sogar ein oszillierendes Verhalten (schwingende Einstellung rechts)) des Ausgangssignals um das Endsignal. Dies führt zu dynamischen Fehlern, hier in hellblau als Fläche unter den Kurven gekennzeichnet. Man sollte stets eine bestimmte Zeit warten, bis sich das System eingependelt hat. Typischerweise möchte man einen Endwert erreichen, der innerhalb eines 1% Toleranzbandes liegt. Hieraus folgt z.B., dass man tatsächlich eine gewisse Dämpfung haben möchte, damit die Schwingungen frühzeitig abklingen. Sollte die Dämpfung jedoch zu hoch werden, können lange Wartezeiten entstehen, bis das Aussgangssignal näherungseise dem Eingangssignal entspricht, bzw. sich diesem angenähert hat.
Show code cell source
import warnings
warnings.filterwarnings('ignore')
#fig = plt.subplots(figsize=(8,4))
plt.figure(figsize=(8, 4))
ax1 = plt.subplot2grid((1,2), (0,0)) # topleft
ax3 = plt.subplot2grid((1,2), (0,1)) # right
plt.style.use('default')
# Transfer Funktion Tiefpass:
T1=0.9
D= 1# aperiodischer grenzfall
T2=2*D*T1
num = np.array([K])
den = np.array([T1, T2 , 1])
H = signal.TransferFunction(num , den)
# Sprungantwort:
t, y = signal.step(H)
# Plotting
# ax3.axhline(y=K, ls='--', color='k')
ax1.axhline(y=K*0.95, ls='--', color='k', lw=1, label = '99% des Messwerts')
ax1.plot(t, y, color='tab:blue')
ax1.fill_between(t,y,1,color='tab:blue',alpha=0.5, label = 'dynamischer Fehler')
ax1.set_yticks([K],['$K \cdot u_e$'])
ax1.set_title("Aperiodische Einstellung")
ax1.set_xlabel("Zeit t")
#ax1.set_xticks([])
ax1.set_xlim(0,7)
#ax3.set_ylabel(r'$u_a(t)$')
ax1.grid(True, lw=0.5, zorder=0, ls = '--', which='minor', axis='both')
ax1.grid(True, lw=0.5, zorder=0, ls = '--', which='major', axis='both')
ax1.legend(loc=4)
# Transfer Funktion Tiefpass:
T1=0.9
D= 0.25# stabiler Schwingfall
T2=2*D*T1
num = np.array([K])
den = np.array([T1, T2 , 1])
H = signal.TransferFunction(num , den)
# Sprungantwort:
t, y = signal.step(H)
# Plotting
ax3.axhline(y=K*1.05, ls='--', color='k', lw=1, label = '1% Toleranzband')
ax3.axhline(y=K*0.95, ls='--', color='k', lw=1)
ax3.plot(t, y, color='tab:blue')
ax3.fill_between(t,y,1,color='tab:blue',alpha=0.5, label = 'dynamischer Fehler')
ax3.set_yticks([K],['$K \cdot u_e$'])
#ax3.set_xticks([])
ax3.set_title("Schwingende Einstellung")
ax3.set_xlabel("Zeit t ")
ax3.set_xlim(0,25)
#ax3.set_ylabel(r'$u_a(t)$')
ax3.grid(True, lw=0.5, zorder=0, ls = '--', which='minor', axis='both')
ax3.grid(True, lw=0.5, zorder=0, ls = '--', which='major', axis='both')
ax3.legend(loc=4)
plt.tight_layout()
Lösung der DGL im Frequenzbereich#
Eine handlichere Methode DGL’s zu lösen ist es diese zuerst in den Frequenzbereich zu transformieren.
1. DGL transformieren: Die Signale werden in den Frequenzraum transformiert.
\(u_\mathrm e (t) \rightarrow U_e(j \omega)\)
\(u_\mathrm a (t) \rightarrow U_a(j \omega)\)
\(\dot u_\mathrm a (t) \rightarrow j \omega U_a(j \omega)\)
Der letzte Punkt resultiert aus den Eigenschaften von Fourier-Transformationen für zeitliche Ableitungen von Zeitsignalen:
In der DGL werden die Zeitsignale durch die Fourier-Transformierten ersetzt:
\[\tau j \omega U_\mathrm a(j \omega) + U_\mathrm a (j \omega) = U_\mathrm e (j \omega)\]2. Sprunganregung einsetzen: Die Fourier-Transformierte der Sprunganregung ist:
\[\mathcal F(u_e(t)) = \frac{1}{j\omega} =: U_\mathrm e (j \omega)\]Die wird oben in die transformierte DGL eingesetzt:
\[\tau j \omega U_\mathrm a(j \omega) + U_\mathrm a (j \omega) = \frac{1}{j\omega} \]3. Lösung hinschreiben: Die letze Gleichung wird nach \(U_\mathrm a (j \omega)\) aufgelöst:
\[\Rightarrow U_\mathrm a (j \omega) = \frac{1}{j\omega \cdot (1 + \tau j \omega)}\]
Hierbei handelt es sich um die Lösung im Frequenzraum, die nach einer Rück-Transformation die gleiche Sprungantwort liefert wie oben bereits hergeleitet. In allgemeiner Form, also ohne das Einsetzen einer Sprunganregung, führt uns dieser Ansatz jedoch zu der sogenannten Übertragungsfunktion, mit der wir uns im nächsten Kapitel beschäftigen wollen.